


















17 - 6
17. ROBOT CONTROLLER CONNECTION
17.4 PLC Side Settings
17.4 PLC Side Settings
17.4.1 Connecting to robot controller
(CRnD-700)
This section describes the settings of a GOT and a robot
controller in the following case of system configuration.
POINTPOINTPOINT
Robot controller (CRnD-700)
For details of the robot controller (CRnD-700), refer to
the following manual.
CRnD-700 SET UP MANUAL
System configuration
Parameter settings for CRnD-700
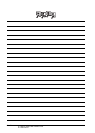
(1) For RT ToolBox2
: Necessary : As necessary : Not necessary
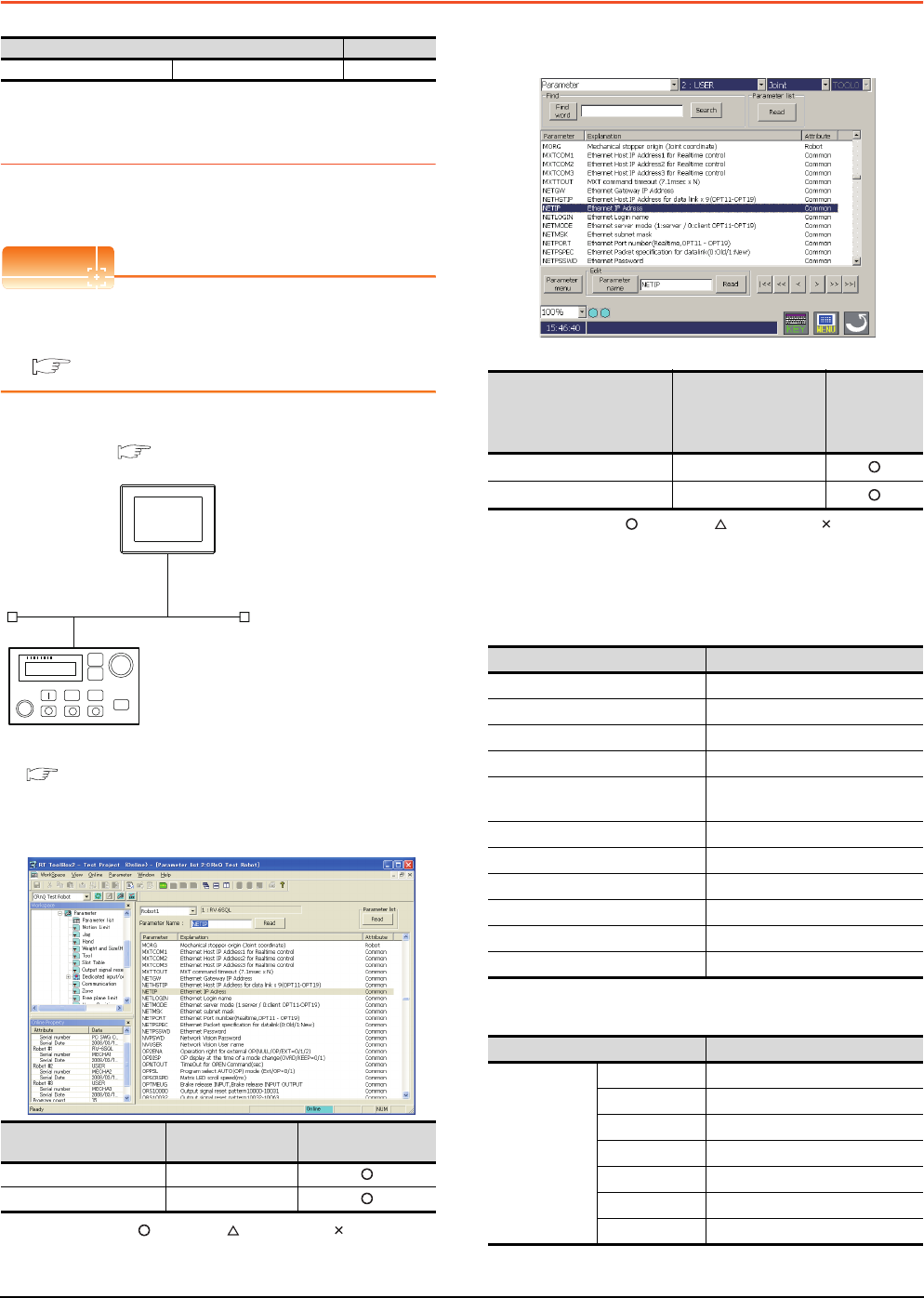
(2) For R32TB or R56TB
(For R56TB)
: Necessary : As necessary : Not necessary
[Controller Setting] and [Ethernet] of GT
Designer3
(1) Communication settings
(2) Ethernet setting
Model Reference
Robot controller CRnD-700 17.4.1
Item Set value
Setting necessity at
GOT connection
NETIP 192.168.0.19
GOTPORT 5001
<GOT> (The settings other than the
following are set to the default)
2
Network No. : 1
PLC No. : 1
IP address : 192.168.0.18
Port No. : 5001
Communication format: UDP (fixed)
Network No. : 1
PLC No. : 2
IP address : 192.168.0.19
Port No. : 5001
Communication format
: UDP(fixed)
<CRnD-700> (The settings other than the
following are set to the default)
■ Parameter settings for CRnD-700
■ [Controller Setting] and [Ethernet] of GT
Designer3
Item Set value
Setting
necessity at
GOT
connection
NETIP 192.168.0.19
GOTPORT 5001
Item Set value
GOT NET No. 1
GOT PLC No. 1
GOT IP Address 192.168.0.18
GOT Port No. (Communication) 5001
GOT Port No.
(Ethernet Download)
5014
Default Gateway 0.0.0.0
Subnet Mask 255.255.255.0
Retry 3times
Startup Time 3sec
Timeout Time 3sec
Delay Time 0ms
Item Set value
Ethernet setting
No.1
Host *
N/W No. 1
PLC No. 2
Type CRnD-700
IP address 192.168.0.19
Port No. 5001 (fixed)
Communication UDP (fixed)