


















16 - 38
16. SERVO AMPLIFIER CONNECTION
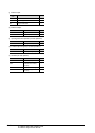
16.6 Device Range that Can Be Set
(j) Alarm (k) External input
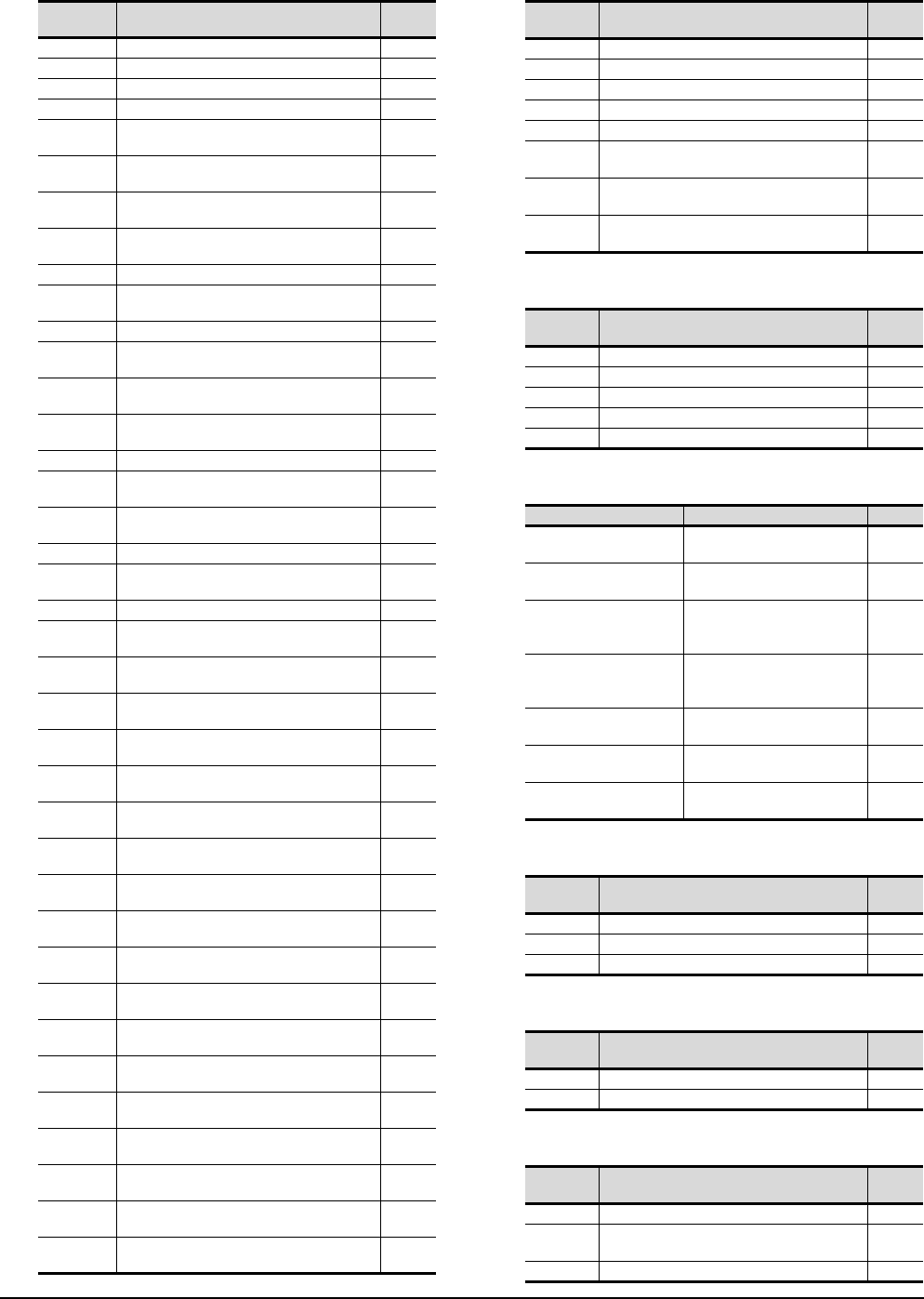
(l) External output
(m) Point table (position)
(n) Input signal for test operation (for test operation)
(o) Forced output of signal pin (for test operation)
(p) Set data (for test operation)
Device
name
Item Symbol
AL0 Current alarm number ―
AL1 Detailed data of current alarms ―
AL11
Servo status when alarm occurs Current position
―
AL12
Servo status when alarm occurs Command position
―
AL13
Servo status when alarm occurs Command
remaining distance
―
AL14
Servo status when alarm occurs
Point table No.
―
AL15
Servo status when alarm occurs Cumulative
feedback pulses
―
AL16
Servo status when alarm occurs
Servo motor speed
―
AL17
Servo status when alarm occurs Droop pulses
―
AL18
Servo status when alarm occurs Override
voltage
―
AL19 Servo status when alarm occurs Override ―
AL20
Servo status when alarm occurs
Analog torque limit voltage
―
AL21
Servo status when alarm occurs
Regenerative load ratio
―
AL22
Servo status when alarm occurs Effective
load ratio
―
AL23
Servo status when alarm occurs Peak load ratio
―
AL24
Servo status when alarm occurs
Instantaneous torque
―
AL25
Servo status when alarm occurs Within one-
revolution position
―
AL26
Servo status when alarm occurs ABS counter
―
AL27
Servo status when alarm occurs
Load inertia moment ratio
―
AL28 Servo status when alarm occurs Bus voltage ―
AL200
Alarm number from alarm history,
Most recent alarm
―
AL201
Alarm number from alarm history
First alarm in past
―
AL202
Alarm number from alarm history
Second alarm in past
―
AL203
Alarm number from alarm history
Third alarm in past
―
AL204
Alarm number from alarm history
Fourth alarm in past
―
AL205
Alarm number from alarm history
Fifth alarm in past
―
AL210
Alarm occurrence time in alarm history
Most recent alarm
―
AL211
Alarm occurrence time in alarm history
First alarm in past
―
AL212
Alarm occurrence time in alarm history
Second alarm in past
―
AL213
Alarm occurrence time in alarm history
Third alarm in past
―
AL214
Alarm occurrence time in alarm history
Fourth alarm in past
―
AL215
Alarm occurrence time in alarm history
Fifth alarm in past
―
AL230
Detailed alarm from alarm history
Most recent alarm
―
AL231
Detailed alarm from alarm history
First alarm in past
―
AL232
Detailed alarm from alarm history
Second alarm in past
―
AL233
Detailed alarm from alarm history
Third alarm in past
―
AL234
Detailed alarm from alarm history
Fourth alarm in past
―
AL235
Detailed alarm from alarm history
Fifth alarm in past
―
Device
name
Item Symbol
DI0 Input device statuses 1 ―
DI1 Input device statuses 2 ―
DI2 Input device statuses 3 ―
DI3 External input pin statuses 1 ―
DI4 External input pin statuses 2 ―
DI5
Statuses of input devices switched on
through communication 1
―
DI6
Statuses of input devices switched on
through communication 2
―
DI7
Statuses of input devices switched on
through communication 3
―
Device
name
Item Symbol
DO0 Output device statuses 1 ―
DO1 Output device statuses 2 ―
DO2 Output device statuses 3 ―
DO3 External output pin statuses 1 ―
DO4 External output pin statuses 2 ―
Device name Item Symbol
POS1 to POS255,
POS1001 to POS1255
Point table
(position) No.1 to 255
―
SPD1 to SPD255,
SPD1001 to SPD1255
Point table
(speed) No.1 to 255
―
ACT1 to ACT255,
ACT1001 to ACT1255
Point table
(acceleration time constant)
No.1 to 255
―
DCT1 to DCT255,
DCT1001 to DCT1255
Point table
(deceleration time constant)
No.1 to 255
―
DWL1 to DWL255,
DWL1001 to DWL1255
Point table
(dwell) (DWL) No.1 to 255
―
AUX1 to AUX255,
AUX1001 to AUX1255
Point table
(auxiliary function) No.1 to 255
―
MCD1 to MCD255,
MCD1001 to MCD1255
Point table
(M code) No.1 to 255
―
Device
name
Item Symbol
TMI0 Input signal for test operation 1 ―
TMI1 Input signal for test operation 2 ―
TMI2 Input signal for test operation 3 ―
Device
name
Item Symbol
TMO0 Forced output from signal pin (CN6) ―
TMO1 Forced output from signal pin (CN10) ―
Device
name
Item Symbol
TMD0 Writes the speed (test mode) ―
TMD1
Writes the acceleration/deceleration time
constant (test mode)
―
TMD3 Writes the moving distance (test mode) ―