


















17. ROBOT CONTROLLER CONNECTION
17.3 GOT Side Settings
17 - 5
17
ROBOT
CONTROLLER
CONNECTION
18
CNC CONNECTION
19
GOT MULTI-DROP
CONNECTION
20
MULTIPLE-GT14, GT12,
GT11, GT10
CONNECTION FUNCTION
21
MULTI-CHANNEL
FUNCTION
22
FA TRANSPARENT
FUNCTION
POINTPOINTPOINT
Example of [Detail setting].
For examples of [Detail setting], refer to the following.
17.4 PLC Side Settings
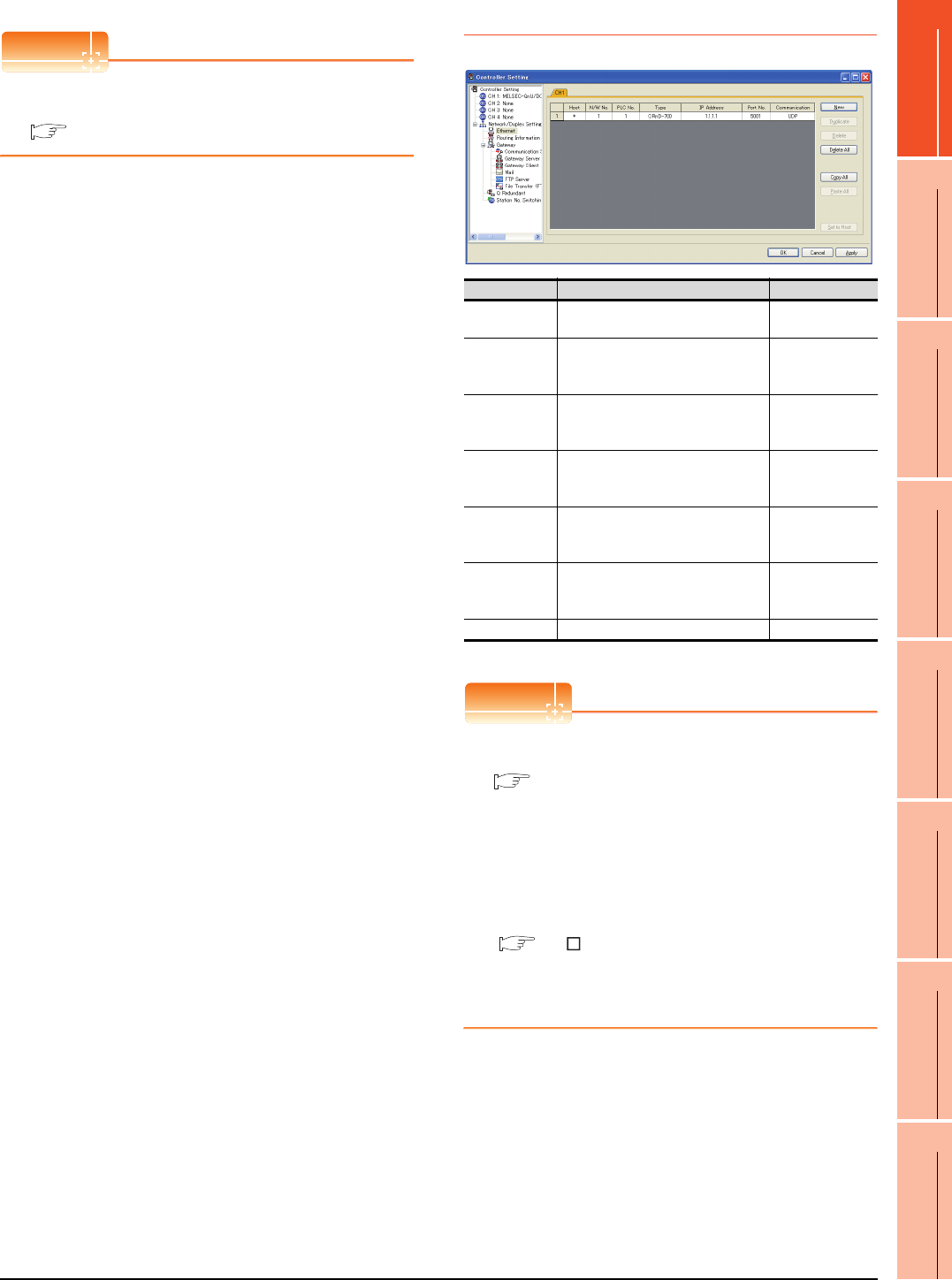
17.3.3 Ethernet setting
*1 Select [CRnD-700] for [Controller Type].
POINTPOINTPOINT
(1) Example of [Ethernet]
For examples of [Ethernet], refer to the following.
17.4 PLC Side Settings
(2) Communication interface setting by Utility
The communication interface setting can be
changed on the Utility's [Communication Settings]
after writing [Communication Settings] of project
data.
For details on the Utility, refer to the following
manual.
GT User's Manual
(3) Precedence in communication settings
When settings are made by GT Designer3 or the
Utility, the latest setting is effective.
Item Description Range
Host
The host is displayed. (The host is
indicated with an asterisk (*))
―
N/W No.
Set the network No. of the connected
Ethernet module.
(Default: blank)
1 to 239
PLC No.
Set the station No. of the connected
Ethernet module.
(Default: blank)
1 to 64
Type
*1
Set the type of the connected
Ethernet module.
CRnD-70(fixed)
CRnD-70(fixed)
IP address
Set the IP address of the connected
Ethernet module.
(Default: blank)
0.0.0.0 to
255.255.255.255
Port No.
Set the port No. of the connected
Ethernet module.
(Default: 5001)
1024 to 65534
Communication UDP (fixed) UDP (fixed)