


















Chapter 7. PARAMETER SETUP
7-24
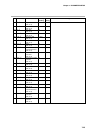
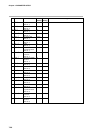
No. Item Code Item Factory User Setting
Setting Setting
21 P -3 100.0
22 1 -3 0
23 D -3 0
24 O L -3 0.0
25 O H -3 100.0
26 R E -3 50.0
27 B R -3 0
28 D P -3 100.0
29 D I -3 120
30 D D -3 0
31 P -4 100.0
32 1 -4 0
33 D -4 0
34 O L -4 0.0
35 O H -4 100.0
36 R E -4 50.0
37 B R -4 0
38 D P -4 100.0
39 D 1 -4 120
40 D D -4 0
• When variable parameter 2 P 1 D setting is 1 (2
degrees of freedom PID enabled), the parameter (P, 1,
D) ideal for control when SP changes and the param-
eter (
D P, D 1, D D) ideal for inhibiting disturbance
during settling are automatically switched.
• Decreasing the proportional band (P, D P) value
improves controllability. However, it also makes
overshoot or hunting more likely to occur.
Use of the controller on a motor or actuator shortens
the controller’s life. Do not set the proportional band
(P, D P) to too small a value.
• Decreasing the reset time (1, D 1) improves trackability.
However, it also makes cycling caused by integrating
action more likely to occur.
When 1 setting is 0, integrating operation for inhibiting
disturbance also functions.
• Increasing the rate time (D, D D) allows overshoot to
be inhibited more easily. However, it also make
hunting more likely to occur as the controller reacts to
minute changes in PV.
In a temperature control system, setting the rate time
to
1
/
3
to
1
/
4
of the integrating time is generally consid-
ered to be appropriate. In a pressure or flow rate
control system, derivative action causes hunting.
Either set the D setting to 0.0 to disable derivative
action, or decrease the setting so that derivative action
is almost negligible. The latter solution is more
frequently adopted.
• The MV upper and lower limits (O L, O H) function as
integrating limits. When the MV reaches the upper or
lower limit, integration no longer functions. This
prevents reset wind-up that occurs when the PV has
not risen for a long time.
• Manual reset (R E) is a setting for eliminating offset
that occurs during proportional action (integrated
action disabled). For manual reset, set the MV ideal for
deviation 0.
• Increasing the brake (B R) value increases the
overshoot inhibit effect. However, it also lengthens the
rise time.
Proportional band
(PID set 3)
Reset time
(PID set 3)
Rate time
(PID set 3)
MV lower limit
(PID set 3)
MV upper limit
(PID set 3)
Manual reset
(PID set 3)
Brake
(PID set 3)
Disturbance inhibit
proportional band
(PID set 3)
Disturbance inhibit
reset time
(PID set 3)
Disturbance inhibit
rate time
(PID set 3)
Proportional band
(PID set 4)
Reset time
(PID set 4)
Rate time
(PID set 4)
MV lower limit
(PID set 4)
MV upper limit
(PID set 4)
Manual reset
(PID set 4)
Brake
(PID set 4)
Disturbance inhibit
proportional band
(PID set 4)
Disturbance inhibit
reset time
(PID set 4)
Disturbance inhibit
rate time
(PID set 4)